Deploying multiple robots into unknown environments has many practical benefits, yet the challenge of planning over the unknown remains difficult to address. With recent advances in deep learning, intelligent control techniques such as reinforcement learning have enabled agents to learn autonomou...
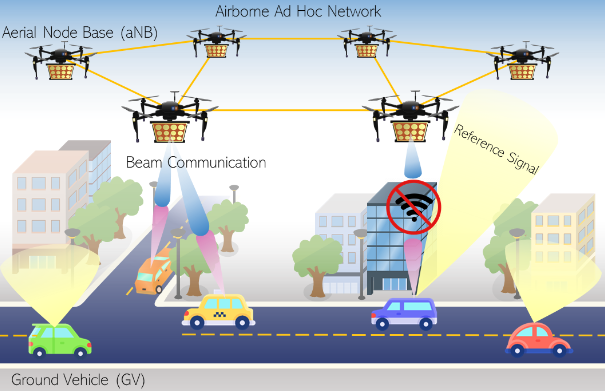
In this paper, we propose a distributed beam tracking scheme for millimeter-wave unmanned aerial vehicle (UAV)-assisted communication systems. In the considered network, aerial node base (aNB) connects the ground vehicles (GV) through directive beams to mitigate the path loss. However, line-of-si...
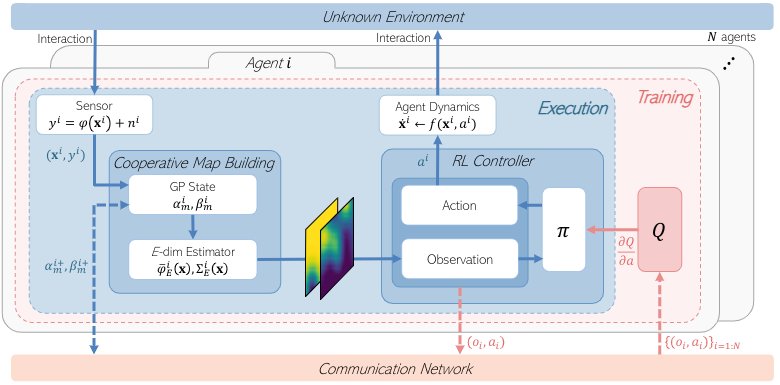
This paper proposes a cooperative environmental learning algorithm working in a fully distributed manner. A multi-robot system is more effective for exploration tasks than a single robot, but it involves the following challenges: 1) online distributed learning of environmental map using multiple ...
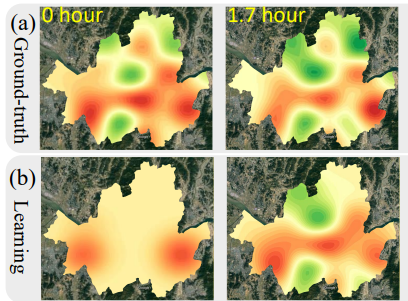
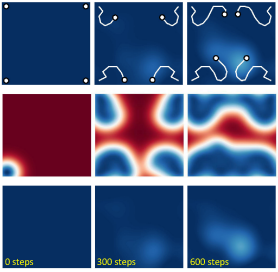
This letter deals with the problem of multiple robots working together to explore and gather at the global maximum of the unknown field. Given noisy sensor measurements obtained at the location of robots with no prior knowledge about the environmental map, Gaussian process regression can be an ef...
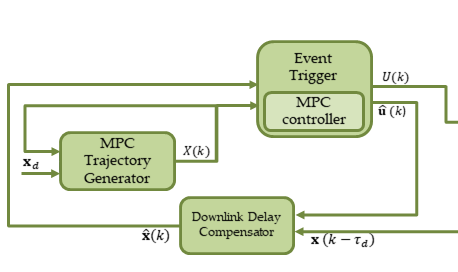
In this paper, we propose a method to improve the networked UAV control system using event-triggered control and model predictive control (MPC). Although the UAV control over the network has many advantages, it involves a long-time delay and packet loss, which adversely affects real-time control ...
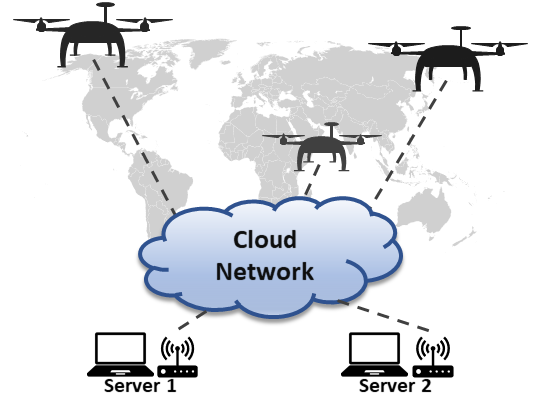
This study addresses an operation of unmanned aerial vehicles (UAVs) in a network environment where there is time-varying network delay. The network delay entails undesirable effects on the stability of the UAV control system due to delayed state feedback and outdated control input. Although seve...
본 연구에서는 화물 운송에 특화된 구조를 갖는 회전익 드론 기반의 플랫폼을 개발하고 영상정보를 활용한 항법, 장애물 인지 기술과 더불어 실시간 경로 계획, 외란에 대처할 수 있는 강인 제어 기술을 통합 구현함으로써, 기존 멀티로터 메커니즘의 제약을 완화하고 실제 환경에서의 자율비행에 필요한 효율성과 안전성을 갖춘 무인 화물 운송 시스템 개발을 목표로 함.
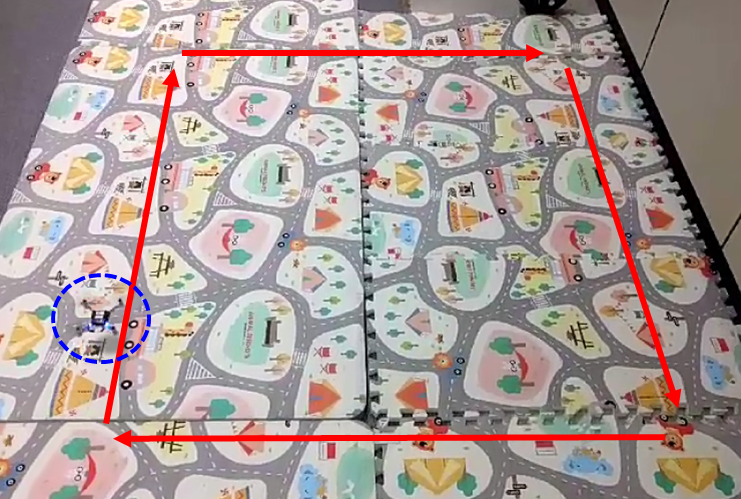
This paper presents a practical method to estimate and control the position of an unmanned aerial vehicle (UAV) considering a network environment with time-varying delay between a server and the UAV. The network delay entails undesirable effects to the stability of the UAV control system due to m...
Deploying multiple robots into unknown environments has many practical benefits, yet the challenge of planning over the unknown remains difficult to address. With recent advances in deep learning, intelligent control techniques such as reinforcement learning have enabled agents to learn autonomou...
In this paper, we propose a distributed beam tracking scheme for millimeter-wave unmanned aerial vehicle (UAV)-assisted communication systems. In the considered network, aerial node base (aNB) connects the ground vehicles (GV) through directive beams to mitigate the path loss. However, line-of-si...
This paper proposes a cooperative environmental learning algorithm working in a fully distributed manner. A multi-robot system is more effective for exploration tasks than a single robot, but it involves the following challenges: 1) online distributed learning of environmental map using multiple ...
This letter deals with the problem of multiple robots working together to explore and gather at the global maximum of the unknown field. Given noisy sensor measurements obtained at the location of robots with no prior knowledge about the environmental map, Gaussian process regression can be an ef...
In this paper, we propose a method to improve the networked UAV control system using event-triggered control and model predictive control (MPC). Although the UAV control over the network has many advantages, it involves a long-time delay and packet loss, which adversely affects real-time control ...
This study addresses an operation of unmanned aerial vehicles (UAVs) in a network environment where there is time-varying network delay. The network delay entails undesirable effects on the stability of the UAV control system due to delayed state feedback and outdated control input. Although seve...
This paper presents a practical method to estimate and control the position of an unmanned aerial vehicle (UAV) considering a network environment with time-varying delay between a server and the UAV. The network delay entails undesirable effects to the stability of the UAV control system due to m...
본 연구에서는 화물 운송에 특화된 구조를 갖는 회전익 드론 기반의 플랫폼을 개발하고 영상정보를 활용한 항법, 장애물 인지 기술과 더불어 실시간 경로 계획, 외란에 대처할 수 있는 강인 제어 기술을 통합 구현함으로써, 기존 멀티로터 메커니즘의 제약을 완화하고 실제 환경에서의 자율비행에 필요한 효율성과 안전성을 갖춘 무인 화물 운송 시스템 개발을 목표로 함.